Técnicas de Geolocalização
Existem quatro classificações principais quando se trata das diferentes abordagens de geolocalização:
- Detecção de proximidade
- Alcance baseado na intensidade do sinal
- Geolocalização baseada em tempo
- Análise de cena
Vamos explorar cada um deles.
Detecção de proximidade
Ao detectar a proximidade, um dispositivo fixo envia uma mensagem que é recebida por um dispositivo móvel. A intensidade do sinal dessas mensagens e o tempo que leva entre o envio e o recebimento podem ser usados para determinar se o dispositivo fixo está fisicamente próximo a um dispositivo móvel. Da mesma forma, um dispositivo móvel pode enviar a mensagem e a infraestrutura fixa pode ser a entidade receptora.
A vantagem de usar a detecção de proximidade é que o algoritmo é simples e fácil de implementar. Além disso, esta abordagem é geralmente barata. A desvantagem é que a precisão dessa abordagem é limitada à presença de um determinado dispositivo fixo nas proximidades.
Quando se trata de técnicas baseadas em alcance, é importante entender que essas técnicas levam o conceito de força de sinal e tempo ainda mais longe. Primeiro, porém, vamos dar uma olhada nos diferentes tipos de técnicas baseadas em alcance.
Normalmente, há sempre duas etapas envolvidas na geolocalização baseada em alcance. A primeira é estimar a distância de um dispositivo móvel de cada um dos vários pontos de ancoragem fixos (como pontos de acesso ou gateways) usando intensidade de sinal, tempo, etc. A segunda etapa é combinar as informações sobre essas distâncias em um algoritmo para estimar a localização do dispositivo móvel. Abordagens possíveis incluem multilateração, mínimos quadrados e máxima verossimilhança, entre outras. Vamos começar examinando as técnicas de localização de propriedade única.
Faixa baseada na intensidade do sinal
Como mencionamos, a intensidade do sinal pode ser usada para determinar a distância entre dois dispositivos. No espaço livre, existe uma ligação direta entre a distância e a intensidade do sinal recebido, dependendo da potência do sinal transmitido, diretividade da antena, etc. No mundo real, no entanto, geralmente existem obstáculos entre os dois dispositivos, resultando em reflexão e outras complicações.
Dê uma olhada nos gráficos a seguir. Os dados nesses gráficos vêm de algumas medições que fizemos na banda 868MHz . Você pode ver claramente que existem alguns pontos onde há uma grande atenuação, provavelmente devido à reflexão de edifícios na área. Nesse caso, determinar a localização do dispositivo não é tão simples. Se você receber uma mensagem de -80dBm, ou mesmo -100dBm, determinar a posição real pode ser um desafio. Os resultados podem mostrar que o dispositivo está entre 100m e 250m do local real.
A maioria dos algoritmos baseados em intensidade de sinal tenta usar modelos internos ou externos para inferir um local e, em seguida, mapeá-los em um teste predeterminado para ver qual modelo é o mais adequado para esse local.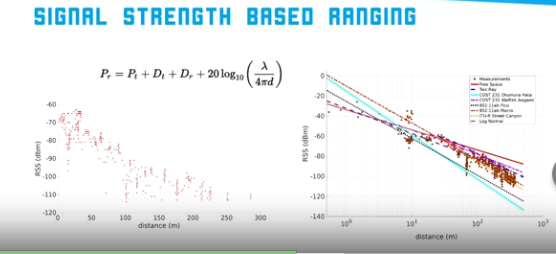
Geolocalização baseada em tempo
Se você optar por usar um método baseado em tempo, a precisão dos relógios integrados envolvidos com o tempo do sinal recebido é muito importante. Veja as ondas sonoras, por exemplo. O som se propaga a 344m/segundo a 21 graus Celsius. Isso significa que, para atingir uma precisão de até cinco metros, você precisa de uma precisão de relógio de 14,5 ms. Em contraste, ao enviar ondas de rádio, que viajam a cerca de 300.000 quilômetros por segundo, para o mesmo nível de precisão, você precisa de 16,7 nanossegundos de precisão. Isso significa que a precisão dos relógios do dispositivo e do gateway é muito importante.
Você pode estar se perguntando como esse tipo de geolocalização realmente funciona. Conforme discutimos, o transmissor envia uma mensagem para o receptor, que tenta determinar quanto tempo a mensagem está “em vôo”, por assim dizer, do transmissor para o receptor. Isso requer que a mensagem de saída tenha um registro de data e hora muito preciso de quando foi enviada. Obter esse carimbo de data/hora é complicado. Para compensar, geralmente usamos a diferença de horário de chegada (TDOA). Ao usar o TDOA, você não precisa saber a hora exata em que o sinal foi enviado pela primeira vez. Em vez disso, você observará os horários em que cada um dos gateways fixos ou pontos de acesso realmente recebe a mensagem. Em seguida, usando medições hiperbólicas, você pode inferir a distância e a posição do dispositivo de envio.
Outra maneira de inferir a localização de um dispositivo é medir o tempo de ida e volta que leva para um dispositivo enviar uma mensagem e para o segundo dispositivo enviar uma resposta. Nesse cenário, desde que você conheça o tempo de processamento do segundo dispositivo, poderá inferir a distância e a localização do primeiro dispositivo.
As vantagens de usar soluções de geolocalização baseadas em tempo são:
- Ele normalmente fornece maior precisão do que o método de intensidade de sinal.
- Ele pode ser combinado com as informações do indicador de força do sinal recebido (RSSI).
No entanto, este método também tem algumas desvantagens:
- Seus dispositivos e gateways devem ter relógios sincronizados e muito precisos
- É necessário haver um sinal de linha de visada entre os dispositivos. Se não houver um sinal de linha de visada, as medições resultantes podem estar erradas, levando a resultados incorretos.
Análise de cena
Com a análise de cena, usamos uma “impressão digital” de como certas intensidades de sinal estão se comportando e, em seguida, tentamos combinar as medições com alguma medição anterior de absorção de pontos definidos.
Sempre há duas etapas ao usar esse método.
- A fase off-line (também chamada de treinamento). Nesta etapa, você cria um banco de dados de posições diferentes. Usando esses dados, você mede as diferentes intensidades de sinal de um ponto de acesso que não está armazenado no banco de dados.
- A fase online (também chamada de fase de localização). Nesta etapa, você tenta igualar a medição do que já está armazenado no banco de dados. A partir desses dados, você pode inferir a posição do dispositivo de envio.
Vejamos esse processo com mais detalhes. Por exemplo, digamos que você tenha cinco pontos de acesso em um corredor, você medirá a intensidade do sinal dos diferentes pontos de acesso e armazenará essas informações em um banco de dados, conhecido como banco de dados de impressão digital de treino.
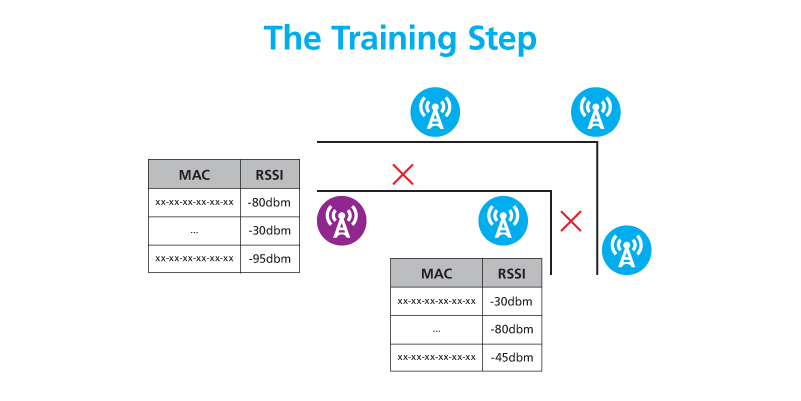
Análise de cena: a etapa de treinamento
Com esses dados, você pode identificar e visualizar as diferentes intensidades de sinal dos pontos de acesso.
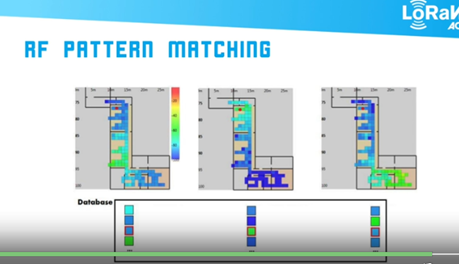
Na etapa de localização do nosso exemplo, uma pessoa entra no corredor e faz uma medição, que será comparada usando o sistema de localização interna em conjunto com o banco de dados de impressão digital de treinamento.
Na fase de treinamento, diferentes estatísticas podem ser armazenadas no banco de dados, como intensidade média do sinal, mínimo, máximo ou desvio padrão, tipos de distribuição, tabelas de frequência, etc. Os dados armazenados dependerão das informações necessárias para o algoritmo que você está usando. A informação que você escolhe armazenar também terá um impacto no número de medições e amostras que você precisa fazer para cada local.
A correspondência de padrão é definida (determinística), como o algoritmo k-Nearest Neighbor (kNN). A filtragem probabilística de partículas também pode ser usada. Em geral, você usará a intensidade média do sinal, possivelmente levando em consideração o desvio padrão. A distância euclidiana ou as distâncias de Kullback Leiber também podem ser usadas para tentar corresponder a posição a uma medição. Isso é bastante desafiador.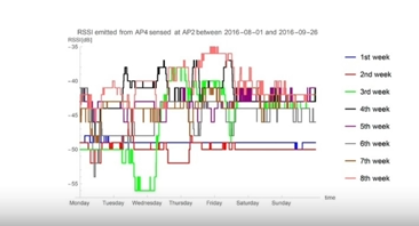
Este gráfico mostra que há uma flutuação significativa nas medições de diferentes pontos de acesso. Essa flutuação pode ser atribuída a pessoas andando pelo corredor, abrindo portas e assim por diante. Como você pode ver, combinar as medidas necessárias para geolocalização nem sempre é simples.